Printrbot LC update – Finally
I do a great deal of micro-blogging on Google+ so check out the latest, my blog will remain with more stationary long term content versus status updates.
So I’ve been printing for a while now and one of the flaws in the Printrbot design is that it will always wobble because the linear rods are not constrained along all axes of movement. This makes it difficult to print at higher speeds than even 60mm/s. Some people have of course gone above and beyond that limit however finely detailed prints at a high speed with the base design are not very likely, in my humble opinion. I’m still pushing the limits of my printer and recently started putting together some testing hardware that will let me empirically evaluate how my bot is performing in terms of accuracy and “wobble”. Anyways, the point of this post is to share some files for a work in progress design I’m working on to correct the wobble issue with the base printrbot design. I hope to have these parts cut and on my bot by the end of October if I don’t run into too much trouble.


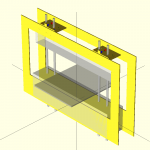
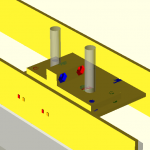


My initial design included three pieces that would be held together through t-slots. Based on feedback from Anthony Morris and Whosawhatsis I then modified it to be a solid arch that would then have a part attached to the linear rod with a space for the threaded rod to move (as it should be). After further thought I decided to replace the front and back panels of the main LC base of the printrbot with my arch so that it would have the greatest strength and rigidity. This would also allow the span between the front and the back to be the anchoring point for the linear rod. I will also be adding a printed part so that a reel of plastic can sit on top of the bot.
At this point the design for the span and the hub that connects the rod to the span is mostly complete and I’m working on the arch and integrating it into the design. All this work is being done in OpenSCAD.
The post that prompted this quick writeup is here